
Glider Programming Architecture
This research project is partially funded by
NSF CSR-CSI #0720836 and
NSF MRI #0821607.
Any opinions, findings, and
conclusions or recommendations expressed in material related to this
project do not necessarily reflect the views of the National
Science Foundation.
In memory of Denitsa Tilkidjieva, a PhD graduate student who worked on
this project.
Students and Faculty
Hans Christian Woithe
-- PhD Student, Department of Computer Science
Ulrich (Uli) Kremer
-- Faculty, Department of Computer Science
Collaborators
David Aragon
-- Reseach Staff, Coastal Ocean Observation Lab
Scott Glenn
-- Faculty, Institute of Marine and Coastal Sciences
Oscar Schofield
-- Faculty, Institute of Marine and Coastal Sciences
David Boehm
-- MS Student, Department of Computer Science
Dimitris Metaxas
-- Faculty, Department of Computer Science
Ivan Seskar
-- Associate Director for Information Technology, Winlab
Ilya Chigirev
-- Research Staff, Winlab
Mike Eichhorn
-- Faculty, Institute for Automation and Systems Engineering, Ilmenau University of Technology, Germany
Manish Parashar
-- Faculty, Department of Electrical and Computer Engineering
Dario Pompili
-- Faculty, Department of Electrical and Computer Engineering
Publications
- Towards a Resource-Aware Programming
Architecture for Smart Autonomous Underwater Vehicles , H.C. Woithe,
D. Tilkidjieva, and U. Kremer, Technical Report, Department of Computer
Science, Rutgers University, DCS-TR-637, June 2008.
- A Programming Architecture for Smart Autonomous Underwater Vehicles ,
H.C. Woithe and U. Kremer, IEEE International Conference on Intelligent Robots and Systems (IROS'09),
St. Louis, Missouri, October 2009.
- Slocum Glider Energy Measurement and Simulation Infrastructure,
H.C. Woithe, I. Chigirev, D. Aragon, M. Iqbal, Y. Shames, S. Glenn, O. Schofield, I. Seskar, and U. Kremer,
IEEE Oceans Conference, Sydney, Australia, May 2010.
- An Interactive Slocum Glider Flight Simulator,
H.C. Woithe and U. Kremer,
IEEE Oceans Conference, Seattle, WA, September 2010.
- Using Slocum Gliders for Coordinated Spatial Sampling,
H.C. Woithe and U. Kremer,
IEEE Oceans Conference, Santander, Spain, June 2011.
- Improving Slocum Glider Dead Reckoning Using a Doppler Velocity Log,
H.C. Woithe, D. Boehm, and U. Kremer,
IEEE Oceans Conference, Kona, Hawaii, September 2011.
- A Lightweight Scripting Engine for the Slocum Glider,
H.C. Woithe and U. Kremer,
IEEE Oceans Conference, Kona, Hawaii, September 2011.
- Opportunities to Parallelize Path Plannning Algorithms
for Autonomous Underwater Vehicles,
M. Eichhorn and U. Kremer,
IEEE Oceans Conference, Kona, Hawaii, September 2011.
- Parallelization of Path Planning Algorithms for AUVs - Concepts,
Opportunities, and Program-Technical Implementation,
M. Eichhorn, H.C. Woithe, and U. Kremer,
IEEE Oceans Conference, Yeosu, South Korea, May 2012.
- Enabling Computation Intensive Applications in Battery-Operated
Cyber-Physical Systems,
H.C. Woithe, W. Brozas, C. Wills, B. Pichai, U. Kremer, M. Eichhorn, and M. Riepen,
MARC Symposium, Toulouse, France, July 2012.
- Assessing Automated and Human Path Planning for the Slocum Glider,
H.C. Woithe, M. Eichhorn, O. Schofield, and U.Kremer,
18-th International Symposium on Unmanned Untethered Submersible Techology (UUST 2013), Portsmouth, New Hampshire, August 2013.
- Comparison of Guidance Modes for the AUV "Slocum Glider" in Time-Varying
Ocean Flow,
M. Eichhorn, H.C. Woithe, and U.Kremer,
IEEE Oceans Conference, Taipei, Taiwan, April 2014.
- Design and Implementation of an Energy Aware Programming Framework
for Autonomous Underwater Vehicles,
H.C. Woithe, Ph.D. Thesis, Rutgers University, May 2014.
- Feature Based Adaptive Energy Management of
Sensors on Autonomous Underwater Vehicles, H.C. Woithe and U. Kremer,
Ocean Engineering, Volume 97, March 2015, pages 21-29.
-
Developing Coordinated Communities of Autonomous Gliders for Sampling Coastal Ecosystems ,
O. Schofield, C. Jones, J. Kohut, U. Kremer, T. Miles, S. Travis, G. Saba, D. Webb, and S. Glenn,
Marine Technology Society Journal, Volume 49, Number 3, May/June 2015, pages 9-16.
-
TrilobiteG: A Programming Architecture for Autonomous Underwater Vehicles,
H.C. Woithe and U. Kremer,
ACM SIGPLAN/SIGBED Conference on Languages, Compilers, Tools and Theory of Embedded Systems (LCTES'15),
Portland, Oregon, June 2015.
The TrilobiteG simulation environment is
available at algaesim.cs.rutgers.edu .
News
In June 2015, we released the first version of the TrilobiteG simulation infrastructure. Users can write
ALGAE programs and submit them for simulation via a secure web portal at
algaesim.cs.rutgers.edu . The simulator is faster than real
time (for example, a 3 hour mission can usually be simulated in less than 10 seconds) and
includes a full software stack simulation for the Slocum glider. The generated sensor, vehicle, and navigation
data is fully compatible with data collected by the physical glider. Existing tools may be used to display
and/or analyse the data. The simulator makes the full data set available. In addition, a subset of the data
is plotted to enable novice users to better understand the sensor and glider behaviors induced by their
ALGAE programs.
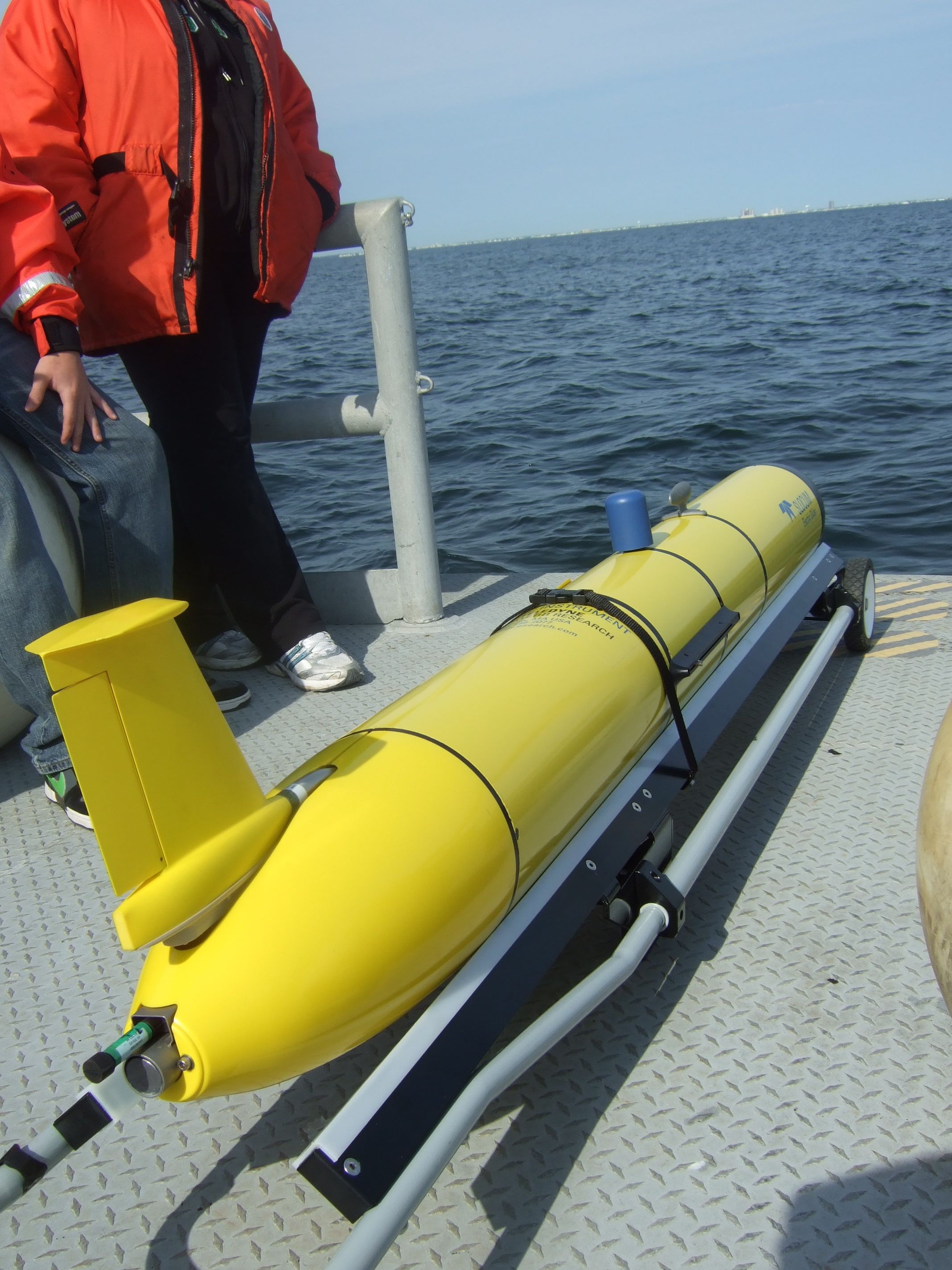
Our lab (CoRE 332) has two Slocum Gliders with a "double payload bay" configuration.
The Slocum Glider is produced by
Teledyne Webb Research . The picture below shows the MRI-2 glider in the foreground, and MRI-1
in the back.
The extended payload bay allows more flexibility by supporting
different sensor, battery, and on-board computer arrangements. Both gliders
have underwater acoustic communication capabilities (WHOI's micro modems, blue cylindrical device on top of the gliders).

The gliders can be equipped with payload bays with a ADCP/DVL sensor, a FIRe sensor, and/or two
bio-pucks. Both gliders have a CTD sensor. In addition, MRI-1 has an optode installed (fixed) in her
aft section.
Missions
The following missions were conducted using gliders owned by Rutgers IMCS or ONR, and deployed from
different research vessels, including
R/V Arabella stationed at the
Rutgers University Marine Field Station (RUMFS)
in Tuckerton, New Jersey.
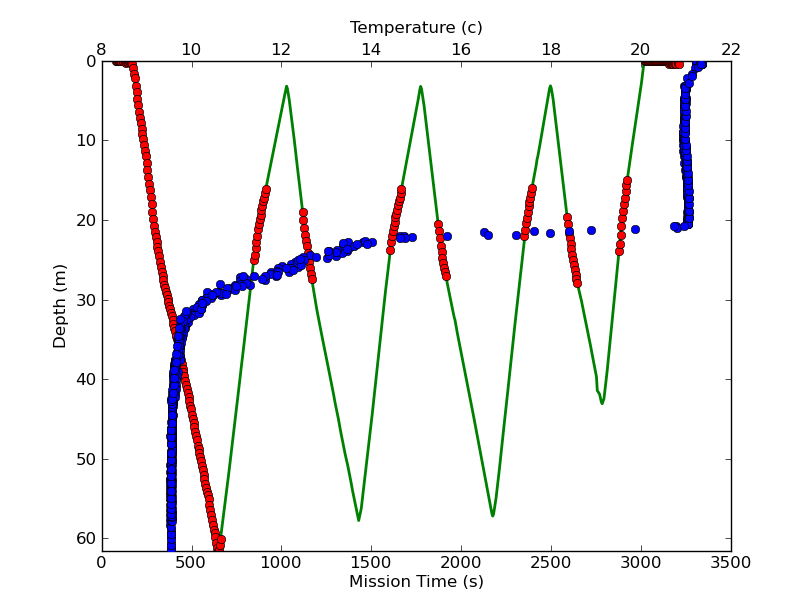
- September 27, 2012 -- MRI-1: Eighth mission, one deployment. The deployment was in approx. 200 feet (65 meters)
of water off the coast of Belmar, New Jersey. Our onboard computer, AvBot, took control of the glider and
used adaptive sampling to trigger the two on-board bio-puck sensors only within or close to the thermocline.
During the first diving pass, the thermocline is detected. Subsequently, the bio-pucks (red dots)
are activated only close to the thermocline. The thermocline temperature reading are shown in blue.
The experiment was repeated several times with similar results. The used triggering algorithm has been refined
over the version that we used in the July 17 deployment (see below).
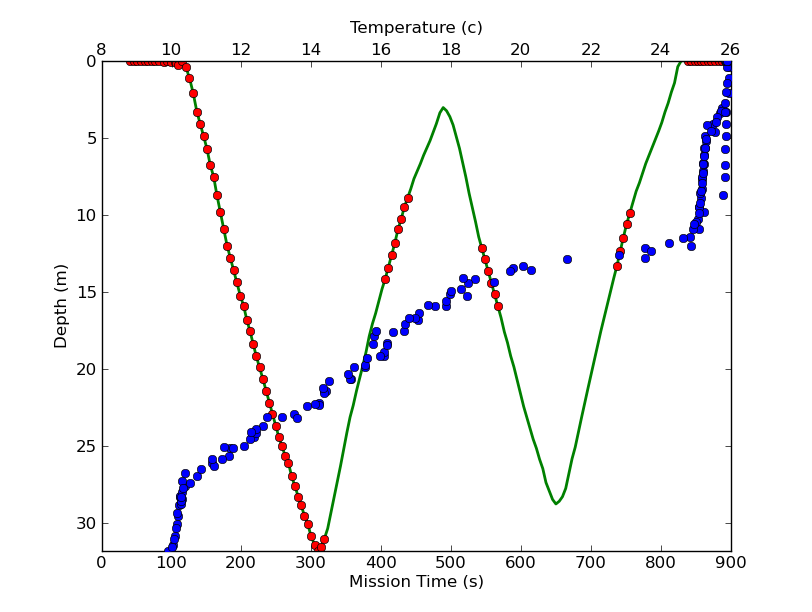
- July 17, 2012 -- MRI-1: Seventh mission, one deployment. The deployment was in approx. 115 feet (35 meters)
of water off the coast of Belmar, New Jersey. Our onboard computer, AvBot, took control of the glider and
used adaptive sampling to trigger the two on-board bio-puck sensors only within or close to the thermocline.
During the first diving pass, the thermocline is detected. Subsequently, the bio-pucks (red dots)
are activated only close to the thermocline. The thermocline temperature reading are shown in blue.
The experiment was repeated twice with similar results.
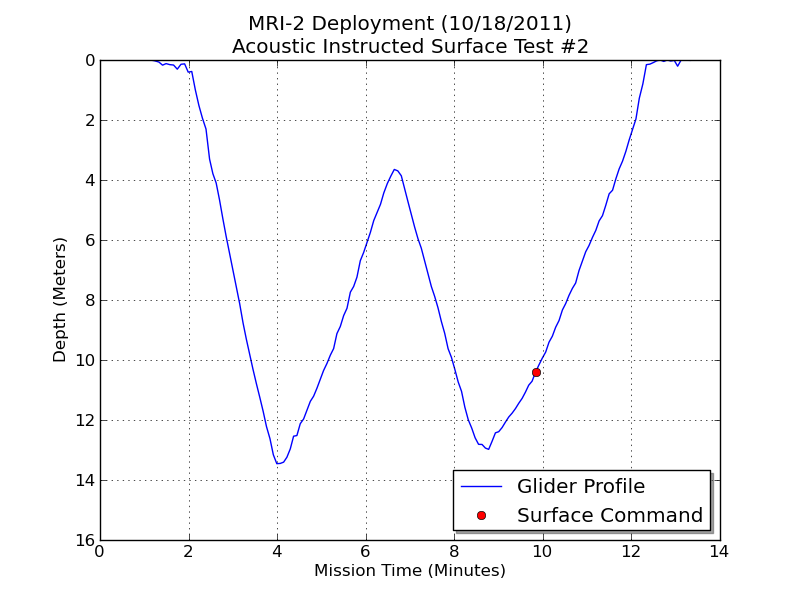
- October 18, 2011 -- MRI-2: Sixth mission, one deployment. This first deployment of MRI-2
was 5 miles off the coast of Atlantic City in approximately 55 feet of water. While submerged,
a "surfacing" command was sent to the glider via an acoustic modem from our deployment vessel.
MRI-2's WHOI acoustic modem received the command, passed it on to our onboard computer, which then
issued an instruction to the flight controller to resurface. We sucessfully repeated this
experiment.
- December 9, 2010 -- Outreach Program: Sixth Grade Science Class at
Maplewood Middle School, New Jersey.
As part of a lesson unit covering density in sixth grade science, we used a 8-foot wave tank to
illustrate how water of different densities mix, such as fresh and salt water. The experiments show
how water of different salinities and therefore different densities form distinct layers. Food colors
were used to allow these layers to be observed.
We also illustrated how water density is used by Autonomous Underwater Vehicles such as the Slocum glider.
The Slocum glider is a buoyancy driven vehicles that changes its overall density to propel itself through
the water column. Students were able to inspect an actual Slocum glider, and use our interactive
glider simulator to plan and fly missions across the continental shelf off the coast of New Jersey.
Overall, we covered five periods of science and were able to reach over 80 students. We would like
to thank Mark Terenzi, a sixth grade science teacher of Team A at Maplewood Middle School, for
all his help and support.
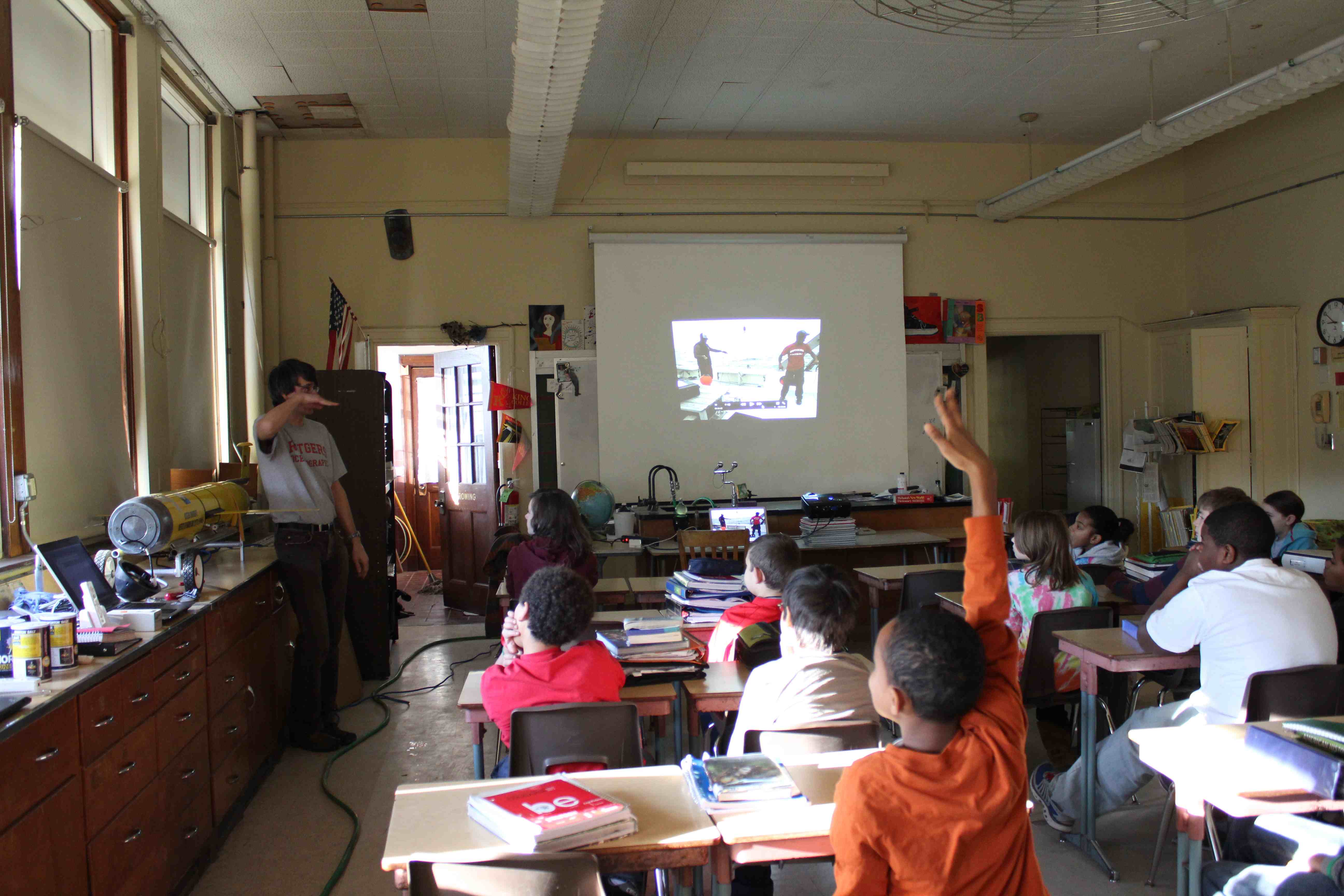

Photos by Hans Christian (Chris) Woithe
- August 3 through September 1, 2010 --
RU01: Fifth mission, one deployment. RU01 is equipped with an updated, more power-efficient version of our
new power measurement infrastructure. The glider went out to the edge of the continental shelf twice,
collecting power measurements of the buoyancy pump and other motors. In addition to obtaining data, the
experiment showed that our infrastructure is efficient enough to be deployed in a 4 week mission.
Flight path of RU01 over a period of 4 weeks.
.
- February 3 through 9, 2010 --
RU07: Fourth mission, one deployment. RU07 was equipped with our new power measurement infrastructure.
This was the first time
that we flew without a safety net, i.e., without a buoy attached to the glider.
The goal was to reach the edge of the continental shelf, take power measurements at depths of up to
100 meters, and verify the overall functionality of the board under field conditions.
Unfortunately, the weather did not cooperate. A Nor'easter forced the glider northward as can
be seen in the mission flight map below. Overall, the mission was still
a success since we got power readings up to a depth of 32 meters and new insights into our
current infrastructure.
This movie spans a 6 day time period, starting from the RU07 deployment on
February 3, to her pick-up on February 9.
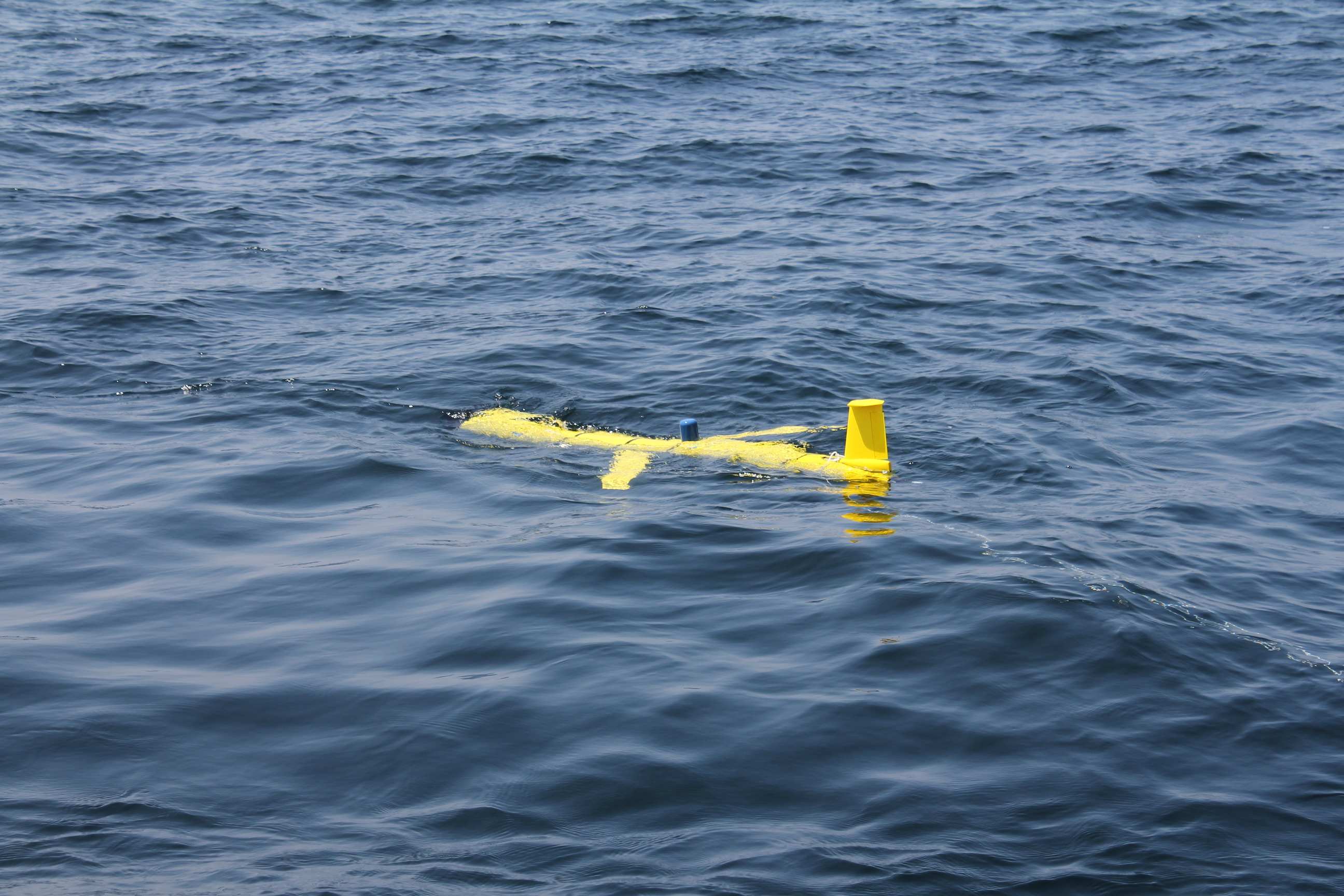
- September 21, 2009 --
RU10: Third mission, one deployment. RU10 was equipped with a new power measurement infrastructure
that is able to measure the in-flight energy consumption of different sensors and motors. The goal of this
mission was to calibrate our new power measurement board. The board was developed in collaboration
with
Ivan Seskar , a researcher
at Winlab , and his students
Yuriy Shames, Ilya Chigirev, and Murium Iqbal. The picture below shows RU10 on the surface
before starting its one hour mission. The glider is connected to a buoy in case of system failure.
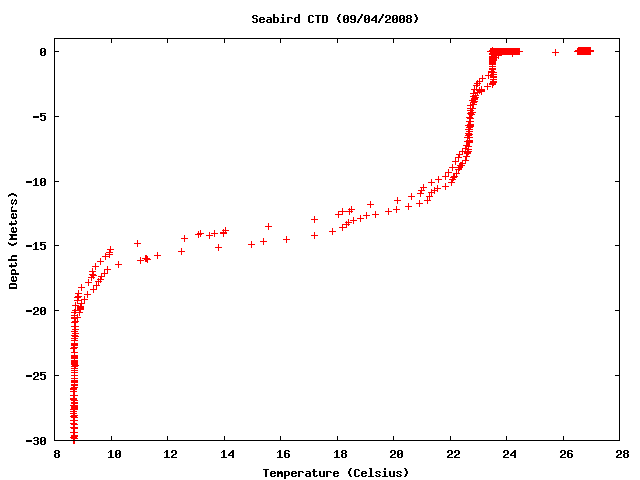
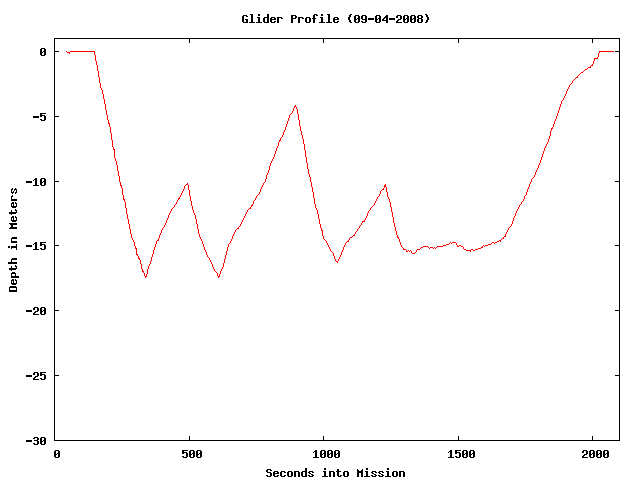
- September 4, 2008 --
RU15: Second mission, one deployment. Successful tracking of a thermocline
at around 15 meter depth off the coast of New Jersey as shown in Figure labeled
Seabird CTD .
The flight path of the glider is shown in Figure labeled Glider Profile .
After 1500 seconds,
the old programming architecture gained control again, and the glider surfaced.
- July 31, 2008 --
RU20July31.2008.mov (61MB):
First mission off the coast of New Jersey with two glider deployments. The
video shows the second deployment of the Slocum glider RU20.
RU20 was equipped with our new programming architecture.
Last updated by Ulrich (Uli) Kremer on June 25, 2015